
- DPT zariadenie
- Klasifikácia motorov
- Funkcie činnosti ventilových motorov
- Vlastnosti zariadenia bez kefiek
- Štruktúra stupňovitého zariadenia
- Princíp činnosti
Pôvod myšlienky jednosmerného motora (DCT) sa objavil na začiatku XIX. Storočia. Slávni fyzici Alessandro Volta, M. Faraday a P. Barlow priniesli svoju víziu tohto procesu do histórie. B. S. Jacobi sa považuje za vynálezcu elektromotora, pretože on bol ten, komu sa podarilo vyrobiť zariadenie s rotačnou armatúrou, ktoré bolo možné uviesť do praxe. Aj keď prvý motor mal nízky výkon, nasledujúci motor už spustil loď.
 >
>
DPT zariadenie
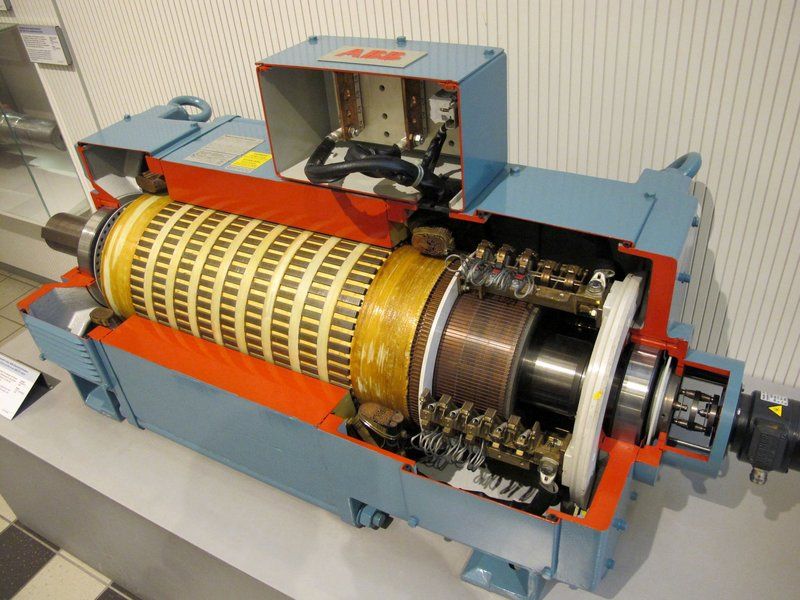
Hlavnými časťami elektrického stroja na jednosmerný prúd sú magnety a vinutia. Pomocné časti zahŕňajú kryt, jadro, hriadeľ, kolektor a kefový mechanizmus. Všetky tieto podrobnosti majú svoj účel.
Jadrá pohyblivých a pevných častí nie sú vyrobené z holistickej štruktúry, ale z plechov z elektrickej ocele. Táto štrukturálna vlastnosť umožňuje prakticky eliminovať vírivé prúdy.
Priama povinnosť kolektora je premena striedavého prúdu, ktorý sa vytvára pri vinutí kotvy, na konštantnú hodnotu. Kolektor je jednotka, ktorá je špecifická pre DC stroje. Je však tiež najzraniteľnejšia, pretože takmer polovica všetkých elektromotorov zlyháva počas prevádzky práve z dôvodu jej poruchy. Neprítomnosť kolektora v štruktúre asynchrónneho alebo synchrónneho stroja zvyšuje jeho spoľahlivosť. Táto výhoda zostáva pre trojfázové aj jednofázové stroje na striedavý prúd.
Riadenie jednosmerného motora znamená zmenu jeho rýchlosti otáčania, pretože jeho hlavnou úlohou je uviesť do chodu ovládacie mechanizmy. Rýchlosť otáčania je možné meniť tromi spôsobmi:
- zmena dodávaného napätia;
- zmena odporu v obvode kotvy;
- zmena magnetického toku vo budiacom obvode.
Klasifikácia motorov
Rozdiely medzi typmi elektrických motorov sú v type magnetov a spôsobe budenia. Magnety môžu byť buď trvalé alebo elektromagnetické. Výhody permanentného magnetu (na rozdiel od elektromagnetu):
- kompaktnosť;
- Nevyžaduje sa prevádzka zdroja energie.
Nevýhodami sú neschopnosť časom nastaviť silu magnetického toku a demagnetizáciu.
Typ budenia DCB závisí od bodu pripojenia vinutia pólu. V tomto ohľade rozlišujú medzi nezávislým budením motora (budiace vinutie je napájané cudzím zdrojom) a vlastným budením (budiace vinutie je spojené s vinutím kotvy). Motory s vlastným vzrušením majú kratšie názvy:
- bočník (paralelné spojenie vinutí);
- sériové (sériové pripojenie vinutí);
- zmes (zmiešané spojenie vinutí).
Elektromotory sa používajú v rôznych oblastiach priemyslu a poľnohospodárstva, ako aj v domácich inštaláciách. Ich rozmanitosť je veľká. Hlavné typy DPT:
- tradičný účel;
- špeciálny účel.
Funkcie činnosti ventilových motorov
Ventilové motory patria do elektrických strojov na špeciálne účely. Za svoje meno vďačí používaniu zariadení na usmerňovanie prúdu v nich - ventilov. Výhody ventilových elektromotorov:
- veľká zmena rýchlosti otáčania;
- vyššia účinnosť v dôsledku znížených magnetických strát v dôsledku nízkeho magnetického odporu;
- aj pri maximálnom zaťažení je výkon celkom dobrý.
Okrem výhod majú niektoré nevýhody. Ale ich hodnota nie je veľká. Medzi hlavné patria:
- hluk;
- riadenie si vyžaduje určitú kvalifikáciu zamestnancov;
- vysoká cena.
 Ich použitie je rôzne: vo výrobe ropy, v chemickom priemysle a vo vrtných súpravách.
Ich použitie je rôzne: vo výrobe ropy, v chemickom priemysle a vo vrtných súpravách.
Hlavným rozdielom medzi ventilom a konvenčným motorom je konštrukcia. Ventil nemá niektoré z obvyklých častí konštrukcie: kolektor a mechanizmus kefy. Namiesto toho je nainštalovaný spínač (menič), pomocou ktorého je riadený motor ventilu. Menič prijíma signál zo snímača polohy rotora.
Snímače polohy rotora môžu byť transformátorové alebo indukčné bezkontaktné prvky. Najbežnejšie sú elektromotorické Hallove senzory. Takéto zariadenie pozostáva z malej doštičky z polovodičového materiálu. Na ňom sú kontaktné zdroje, ku ktorým sú elektródy pripojené, pripojené k zdroju energie. Výstupy výstupného signálu sa tiež spájkujú s príslušnými spojmi platne. Požiadavky na snímače polohy rotora sú:
- kompaktnosť;
- minimálna hodnota vstupného výkonu;
- vysoká multiplicita signálu, maximálna aj minimálna;
- spoľahlivá prevádzka za akýchkoľvek podmienok prostredia.
 Spínač je vyrobený na polovodičoch. Jeho úloha je podobná úlohe jednotky kefy a kolektora v bežných motoroch a spočíva v zmene smeru prúdu. Na jadre lôžka je umiestnené vinutie kotvy a na rotore je umiestnený permanentný magnet. Táto konštrukcia vylučuje možnosť skĺzavého kontaktu s kotvou.
Spínač je vyrobený na polovodičoch. Jeho úloha je podobná úlohe jednotky kefy a kolektora v bežných motoroch a spočíva v zmene smeru prúdu. Na jadre lôžka je umiestnené vinutie kotvy a na rotore je umiestnený permanentný magnet. Táto konštrukcia vylučuje možnosť skĺzavého kontaktu s kotvou.
Motor ventilu má prúd v sínusových fázach. Budenie môže byť dvoch typov:
- elektromagnetické;
- magnetoelektrického.
Pri elektromagnetickom budení je vinutie poľa umiestnené na póloch. Je pripojený k sieti pomocou klzných krúžkov umiestnených na hriadeli rotora. Vytváranie magnetického poľa teda nastáva elektromagnetickými prostriedkami.
V prípade magnetoelektrického budenia nedôjde k posuvnému kontaktu v budiacom obvode alebo v kotvovom obvode. Póly budú pôsobiť stále magnety. Tieto motory sa nazývajú kefové motory.
Vlastnosti zariadenia bez kefiek
 Jednosmerný jednosmerný motor (BDTT) sa výrazne líši od motora ventilu. Jeho prúd vo fázach vyzerá lichobežníkovo. BDTT je usporiadané jednoduchšie: modulácia šírky impulzu je nahradená prepnutím 120 alebo 180 stupňov. Hlavnými úlohami bezkartáčového motora je presná poloha rotora v požadovanom intervale a vysoká rýchlosť rotácie.
Jednosmerný jednosmerný motor (BDTT) sa výrazne líši od motora ventilu. Jeho prúd vo fázach vyzerá lichobežníkovo. BDTT je usporiadané jednoduchšie: modulácia šírky impulzu je nahradená prepnutím 120 alebo 180 stupňov. Hlavnými úlohami bezkartáčového motora je presná poloha rotora v požadovanom intervale a vysoká rýchlosť rotácie.
Konštrukcia môže byť dvoch typov: s magnetmi na pohyblivej časti (kotva) alebo nehybnou (stator). Automatizačné zariadenia na chladenie používajú pohony s konštrukciou ukotvených magnetov. Ich charakteristickou črtou je rýchle dosiahnutie vysokej rýchlosti.
 V systémoch zdravotníckych zariadení je umiestnenie magnetov na statore bežné. Tieto mikromotory sa nazývajú motory s vysokým krútiacim momentom. Ich rýchlosť otáčania nie je tak veľká, ale v dôsledku nedostatku budiaceho vinutia a prítomnosti permanentných magnetov odvádzajú dobrú prácu pri preťažení a udržiavajú presnosť polohy v priestore.
V systémoch zdravotníckych zariadení je umiestnenie magnetov na statore bežné. Tieto mikromotory sa nazývajú motory s vysokým krútiacim momentom. Ich rýchlosť otáčania nie je tak veľká, ale v dôsledku nedostatku budiaceho vinutia a prítomnosti permanentných magnetov odvádzajú dobrú prácu pri preťažení a udržiavajú presnosť polohy v priestore.
Signál na vinutie takýchto elektrických strojov bude vychádzať z vodiča, ktorého úlohou je regulovať krútiaci moment. Aby sa kotva mohla otočiť pod určitým uhlom, je potrebné na potrebné vinutia priviesť napätie. Hladkosť rotácie sa nedá udržať, ale dá sa dosiahnuť vysoká rýchlosť rotácie.
Rozdiel medzi motorom kolektora a motorom bez kefky je v štruktúre aj v prevádzke. Zberné motory nepotrebujú ovládač, ale prevádzka bezkomutátorového motora bez jeho účasti je neprijateľná. Výhody bezkartáčových motorov:
- schopnosť pracovať v podmienkach s rôznymi environmentálnymi charakteristikami;
- dlhodobé používanie;
- spoľahlivosť v práci.
 Nevýhodou sú náklady. Je to dosť vysoké kvôli prítomnosti polovodičového spínača, permanentného magnetu a citlivých prvkov v štruktúre.
Nevýhodou sú náklady. Je to dosť vysoké kvôli prítomnosti polovodičového spínača, permanentného magnetu a citlivých prvkov v štruktúre.
Zostaviť ventil alebo DPT vlastnými rukami je nevďačná úloha. Materiály, zložitosť práce a čas strávený budú oveľa drahšie ako peniaze vynaložené na nákup motorov továrne. Spoľahlivosť a bezpečnosť však budú niekoľkokrát vyššie.
Výber týchto elektrických strojov sa musí vykonať na základe charakteristík vodičov s kanálmi modulácie so šírkou impulzu:
- maximálny stres pri dlhodobom používaní;
- maximálna rýchlosť otáčania;
- prípustná prúdová sila;
- aktuálna frekvencia (bežné zariadenia 7-8 kHz, pokročilejšie modely - 16-32 kHz).
 Hlavnými článkami riadenia bezkomutátorového motora sú snímače polohy. Signál z nich sa prenáša do riadiacej jednotky a v dôsledku toho dôjde k prepnutiu. Prevádzka týchto zariadení bez senzorov je však možná. V tomto prípade hrá úlohu pokles napätia cez vinutie, ktoré je v určitom okamihu nefunkčné.
Hlavnými článkami riadenia bezkomutátorového motora sú snímače polohy. Signál z nich sa prenáša do riadiacej jednotky a v dôsledku toho dôjde k prepnutiu. Prevádzka týchto zariadení bez senzorov je však možná. V tomto prípade hrá úlohu pokles napätia cez vinutie, ktoré je v určitom okamihu nefunkčné.
Podľa počtu fáz je mnoho motorov trojfázových a na ich ovládanie je potrebný ďalší uzol v zariadení - jednosmerný usmerňovač v trojfázovom impulze. Regulácia trojfázového jednosmerného jednosmerného motora tiež spôsobuje určité ťažkosti v dôsledku paralelného riadenia niekoľkých parametrov. Pretože elektrické stroje zariadenia sú reverzibilné, je možné bezkomutátorový motor pripojiť ako generátor.
Štruktúra stupňovitého zariadenia
Rad striedavých motorov na špeciálne účely sú krokové motory. Niekedy sa im hovorí impulz. Vzťahujú sa na synchrónne elektromotory na špeciálne účely. Princíp ich činnosti spočíva v tom, že krokové kroky na výstupe sa získavajú v dôsledku napäťových impulzov na vstupe. Typy krokových motorov podľa typu rotora:
- nadšený;
- reaktívne.
Štruktúra zariadenia s aktívnym rotorom naznačuje prítomnosť elektromagnetov alebo permanentných magnetov. U motorov s prúdovým rotorom nie je vinutie v teréne. Rotor je vyrobený z mäkkého magnetického materiálu.
Riadiace vinutie je umiestnené na pevnej časti - statore. Podľa počtu fáz sa môže líšiť, ale najbežnejšie sú trojfázové vinutia.
Princíp činnosti
 Ak krokový motor na statore má dva páry pólov s dvoma ovládacími vinutiami, potom bude jeho rotácia závisieť od napájacieho napätia riadiaceho vinutia. Keď sa na riadiace vinutie, ktoré je umiestnené na prvom páre, privedie signál, rotor sa otočí a zaujme polohu pozdĺž svojej osi. Keď sa na vinutí druhého páru objaví signál, rotor bude musieť zaujať polohu medzi týmito pólmi.
Ak krokový motor na statore má dva páry pólov s dvoma ovládacími vinutiami, potom bude jeho rotácia závisieť od napájacieho napätia riadiaceho vinutia. Keď sa na riadiace vinutie, ktoré je umiestnené na prvom páre, privedie signál, rotor sa otočí a zaujme polohu pozdĺž svojej osi. Keď sa na vinutí druhého páru objaví signál, rotor bude musieť zaujať polohu medzi týmito pólmi.
Keď je signál vypnutý na vinutí prvého páru a zostávajúci signál na ovládacom vinutí druhého páru pólov, rotor sa bude otáčať na svojej osi. Pri otáčaní sa teda bude zdať, že podnikne kroky, a preto nesie také meno. Kroky motora (uhol rotácie rotora) s dvoma pármi pólov budú rovnaké ako 45 stupňov. Spínací systém bude štvortaktný.
Pre tlačidlový spínací systém s rovnakým počtom párov pólov je potrebné, aby signál vždy dorazil iba k jednému špecifickému riadiacemu vinutiu konkrétneho páru pólov. Potom sa uhol rotácie rotora zmení a bude 90 stupňov.
Princíp činnosti krokového motora bol zrozumiteľný aj pre figuríny, musíte venovať pozornosť schéme.

Rotor zaujme polohu v priestore proti dvojici pólov, na ktorých vinutí bude dodávaná energia. Ak sú vinutia susedných pólov dodávané dve energie, rotor zaujme polohu medzi nimi. Čím je hodnota kroku motora menšia, tým presnejšia a stabilnejšia je jeho prevádzka.
Krokový motor vyžaduje spínač. Jeho úlohou je premeniť riadiace impulzy určitej sekvencie na pravouhlé impulzy v systéme s požadovaným počtom fáz.
Pri veľkom zaťažení motora bude znížená presnosť rotácie rotora. Bude sa točiť s určitým oneskorením, čo je uhol statickej chyby. Keď je krokový motor vo voľnobehu, hodnota uhla statickej chyby je nula.
Pretože rýchlosť procesov je nepriamo úmerná odporu regulačných vinutí, používajú sa na urýchlenie rotácie rotora odpory. Sú sériovo zapojené do obvodu vinutia ovládania statora. Posúdiť efektívnosť práce na hlavnom ukazovateli - hodnota vstupného výkonu.