
- Rozdiel a odrody krokových motorov
- Dizajn a princíp činnosti
- Metódy fázovej kontroly
- Metódy riadenia krokového motora
- Režim jazdy Microstepping
 Krokový motor je elektromechanické zariadenie, ktoré prevádza elektrické signály na diskrétne uhlové posuny hriadeľa. Použitie krokových motorov umožňuje pracovným telesám strojov vykonávať prísne odmerané pohyby a upevňovať svoju polohu na konci pohybu.
Krokový motor je elektromechanické zariadenie, ktoré prevádza elektrické signály na diskrétne uhlové posuny hriadeľa. Použitie krokových motorov umožňuje pracovným telesám strojov vykonávať prísne odmerané pohyby a upevňovať svoju polohu na konci pohybu.
Používajú sa na CNC strojoch, robotike, kde sú potrebné diskrétne pohyby, fixácia polohy a nízka rýchlosť.
Rozdiel a odrody krokových motorov
Z princípu činnosti sú bližšie k jednosmerným motorom. Konštrukcia elektrických motorov sa neustále zdokonaľuje, aby sa znížili náklady na pracovnú silu vo výrobe, zvýšila sa účinnosť a zvýšil sa počet otáčok. V porovnaní s jednosmerným motorom nemajú kefy, kolektor a vinutia s menším počtom otáčok.
Medzi prvé motory bol vytvorený miniatúrny stroj pre hodinky a pomenovaný po francúzskom inžinierovi Mariusovi Lovetovi. Stator je rozpojený na okrajoch alebo v oblasti rotora má malé zúženia. Rotor s priemerom 1, 5 mm, magnetický na báze kobaltu. Jedno vinutie v jednom rade 1, 5 V. Uhol natočenia je 90 stupňov.
Lávový motor sa tiež používa v medicíne na čerpanie rôznych kvapalín a často sa používa aj v miešačkách a miešačkách.
V poslednej dobe vývoj piezoelektrických motorov využívajúcich piezomagnetický efekt a využívajúci feromagnetické materiály v konštrukcii. Lineárne motory sú vylepšené, v ktorých sa hriadeľ neotáča, ale vykonáva lineárne pohyby. Pokiaľ ide o presné mechanické zariadenia, ruskí výrobcovia vyrábajú motory s označením série:
 LH.
LH.- DSHR.
- DSHG.
- DSHL.
- SM.
- DSHE
Takéto podniky ako NPO ATOM, ZETEK, spoločnosť Elektroprivod, Stepmotor, Vekson, NPO RIF, Saratov el. mechanický, VNIIEM Corporation, ZAO Uralelectromash, ARC Energoservice. Zahraničné spoločnosti: Plniaci motor, Autonics, Motionking Motor YUHA, Jlangsu, Phytron a ďalšie sa zaoberajú výrobou motorových pohonov FL 203, FL 28, FL 57, 35 HS, 57 HS, 17 HD. Ponuka vyrábaných motorových pohonov je rozmanitá: veľkosťou, výkonom, so zabudovanou prevodovkou a riadiacou doskou.
Dizajn a princíp činnosti
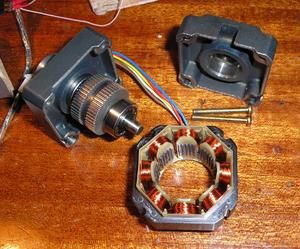
 Krokový motor pozostáva zo statora a rotujúceho rotora. Jadro statora je vyrobené vo forme sady plechov z elektrickej ocele (lisované). To znižuje vírivé prúdy a tým aj zahrievanie. Stator je obvodovo rozdelený na 4, 6, 8 pozdĺžnych drážok. Platí to ešte viac. Na výstupkoch medzi drážkami sú vinutia vo forme cievok. Počet slotov zodpovedá počtu pólov motora. Čím viac pólov, tým menší uhol rotácie rotora, to znamená stúpanie.
Krokový motor pozostáva zo statora a rotujúceho rotora. Jadro statora je vyrobené vo forme sady plechov z elektrickej ocele (lisované). To znižuje vírivé prúdy a tým aj zahrievanie. Stator je obvodovo rozdelený na 4, 6, 8 pozdĺžnych drážok. Platí to ešte viac. Na výstupkoch medzi drážkami sú vinutia vo forme cievok. Počet slotov zodpovedá počtu pólov motora. Čím viac pólov, tým menší uhol rotácie rotora, to znamená stúpanie.
Rotor pozostáva z jedného alebo dvoch permanentných magnetov s koncami, ktorých kovové dosky sú pripevnené zubami. V tomto prípade sú zväzky S a N permanentného magnetu rozdelené do n pólov, čo zodpovedá počtu zubov. Ovplyvňuje tiež veľkosť kroku rotácie. Podľa konštrukcie ШД sa vyrábajú tri typy v závislosti od konštrukcie rotora:
- reaktívne;
- rotor s permanentným magnetom;
- Hybrid.
 Reaktívny - rotor je vyrobený z feromagnetického materiálu s pozdĺžnymi drážkami, stožiarmi. Používa sa zriedka, iba na jednoduché úlohy. Hlavne kvôli tomu, že nemá blokovací moment. Hybridný - rotor je vyrobený z dvoch polovíc feromagnetického materiálu, s pozdĺžnymi drážkami a medzi nimi je umiestnený permanentný magnet. Drážky polovíc sú voči sebe posunuté o malý uhol, aby sa zmenšil rozstup. Najčastejšie sa používajú.
Reaktívny - rotor je vyrobený z feromagnetického materiálu s pozdĺžnymi drážkami, stožiarmi. Používa sa zriedka, iba na jednoduché úlohy. Hlavne kvôli tomu, že nemá blokovací moment. Hybridný - rotor je vyrobený z dvoch polovíc feromagnetického materiálu, s pozdĺžnymi drážkami a medzi nimi je umiestnený permanentný magnet. Drážky polovíc sú voči sebe posunuté o malý uhol, aby sa zmenšil rozstup. Najčastejšie sa používajú.
Keď je na vinutie statora privedené pulzné napätie, generuje sa elektromagnetické pole. Interakcia s najbližším pólom permanentného magnetu vytvára krútiaci moment. Hriadeľ motora sa otáča o určitý uhol. Uhol rotácie závisí hlavne od počtu pólov rotora.
Takýto motor sa bude nazývať steper. Em 422 Series WD sa vďaka svojej malej veľkosti používa v ihličkových tlačiarňach.
Metódy fázovej kontroly
Ovládanie závisí hlavne od počtu pólov a konfigurácie vinutí statora. SD sa vyrábajú hlavne s nasledujúcimi vinutiami:
- Dve vinutia so 4 kolíkmi.
- Dve vinutia so 6 vodičmi s priemernou svorkou.
- Štyri vinutia - 8 záverov.
 Môžete ovládať dve metódy, použiť unipolárne napätie - unipolárne alebo bipolárne - bipolárne. Unipolárny krokový motor má 4 póly a 2 vinutia. V štvorfázovej fáze je každé vinutie rozdelené na polovicu a nachádza sa na opačných póloch. Rotácia sa vykonáva striedavým privádzaním napätia na vinutie. So 6 zvodmi alebo 5, tiež 2 vinutiami, ale s kohútikom zo stredu. Typicky sú stredné vodiče cievky spojené spolu so záporným drôtom a pozitívny signál pomocou spravovaných kľúčov sa privádza do vinutí.
Môžete ovládať dve metódy, použiť unipolárne napätie - unipolárne alebo bipolárne - bipolárne. Unipolárny krokový motor má 4 póly a 2 vinutia. V štvorfázovej fáze je každé vinutie rozdelené na polovicu a nachádza sa na opačných póloch. Rotácia sa vykonáva striedavým privádzaním napätia na vinutie. So 6 zvodmi alebo 5, tiež 2 vinutiami, ale s kohútikom zo stredu. Typicky sú stredné vodiče cievky spojené spolu so záporným drôtom a pozitívny signál pomocou spravovaných kľúčov sa privádza do vinutí.
Bipolárne motory majú 4 vinutia, 2 pre každú fázu. K ovládaniu dochádza pri zmene polarity vinutia. S týmto riadením je schéma zapojenia krokového motora komplikovaná, ale krútiaci moment sa získava viac. Hlavnými charakteristikami sú napájacie napätie, spotrebovaný fázový prúd, krok, výkon a veľkosť príruby. Sedadlá sú štandardizované a označené napríklad Nema 23. To zodpovedá vzdialenosti medzi otvormi pre montáž 57 mm.
Metódy riadenia krokového motora
 Použitie motorických pohonov v CNC strojoch súťaží iba so servopohonmi, napríklad v eróznych strojoch alebo tlačiarňach ich dokonca prekonávajú svojimi technickými schopnosťami, nákladmi a jednoduchými schémami riadenia. Správa sa môže vykonávať na digitálnych mikroobvodoch, špecializovaných - A3977, na naprogramovaných PIC16, pomocou kľúčov alebo ovládačov SMSD 1.5.
Použitie motorických pohonov v CNC strojoch súťaží iba so servopohonmi, napríklad v eróznych strojoch alebo tlačiarňach ich dokonca prekonávajú svojimi technickými schopnosťami, nákladmi a jednoduchými schémami riadenia. Správa sa môže vykonávať na digitálnych mikroobvodoch, špecializovaných - A3977, na naprogramovaných PIC16, pomocou kľúčov alebo ovládačov SMSD 1.5.
Väčšina ovládačov je riadená počítačom cez porty RS-232, USB a LPT. Generujú riadiace signály: krok, smer, rozlíšenie a poskytujú ½ kroku rozdeleného na 1/32 a pracujú s programami: MACH3, KCam, DeskCNC, Turbocnc a ďalšie. Pripojte motor k vodičovi pomocou kábla podľa popisu. Po preštudovaní práce programu nie je ťažké začať pracovať. Na zahrnutie sa používa napätie od 5 do 48 voltov. Výnimkou sú 220/110 voltové motory .
Režim jazdy Microstepping
Hlavná prevádzková doba krokového motora je v krokovom alebo polovičnom režime a pri štarte a zastavení je vhodné použiť pre presnú fixáciu mikrokrokový režim. Režim krok za krokom je určený návrhom a reguláciou impulzov. Počas mikrokrokovania sa na vinutia aplikujú sínusové napätia s požadovaným fázovým posunom.
Rotor je fixovaný v určitom pomere fáz prúdov vo vinutiach. Výpočet rovnovážneho bodu pomocou vzorca x = S * pi / 2 * arctan a / b kde:
- a je okamih vytvorený prvou fázou ab je druhá fáza;
- x je rovnovážny bod rotora alebo mikrokroku v radiánoch;
- S je stupňový uhol.
 Taktiež je potrebné vziať do úvahy maximálnu frekvenciu riadiaceho signálu, pri ktorej nedochádza k žiadnym stratám alebo pridaniu ďalšieho kroku počas prevádzky. Je hlavným ukazovateľom prechodového režimu krokového motora a v charakteristikách je uvedená ako frekvencia odozvy motora.
Taktiež je potrebné vziať do úvahy maximálnu frekvenciu riadiaceho signálu, pri ktorej nedochádza k žiadnym stratám alebo pridaniu ďalšieho kroku počas prevádzky. Je hlavným ukazovateľom prechodového režimu krokového motora a v charakteristikách je uvedená ako frekvencia odozvy motora.
Počas prevádzky je potrebné monitorovať čistotu okolo pohonu a zabrániť vniknutiu kovových triesok, je možné zlyhanie pohonu motora. Nájdite spôsob, ako chrániť disk. Oprava je podobná ako oprava komutátorového motora, vyžaduje si presnosť.
Po demontáži zoberte a vyfúknite stator stlačeným vzduchom a utrite rotor handrou. Skontrolujte hádzanie ložiska.