
- Čo je to frekvenčná konverzia
- Výber motora
- Získanie magnetického poľa
- Priemyselné frekvenčné meniče
- Výhody používania frekvenčných prevodníkov
- Regulácia vektora a frekvencie
- Invertorská technická implementácia
- Zásada regulácie rýchlosti
 Pomerne často mnohí šunky alebo len podnikatelia potrebujú kontrolovať rýchlosť trojfázového motora. Nemá zmysel používať na to banálny regulátor výkonu, pretože je postavený na princípe zmeny napätia, a napriek tomu, ako viete, striedavé motory nechcú byť regulované týmto spôsobom, dokonca ani jednofázové.
Pomerne často mnohí šunky alebo len podnikatelia potrebujú kontrolovať rýchlosť trojfázového motora. Nemá zmysel používať na to banálny regulátor výkonu, pretože je postavený na princípe zmeny napätia, a napriek tomu, ako viete, striedavé motory nechcú byť regulované týmto spôsobom, dokonca ani jednofázové.
Otáčky sa samozrejme zmenia, ale iba v malom a takmer nepostrehnuteľnom limite, po ktorom, keď sa dosiahne dolný prah a keď sa napája 220 V pri 150 V, otáčky sa úplne zastavia. Ak hriadeľ tiež potrebuje prijať normálny okamih, napríklad pri regulácii rýchlosti dopravníka alebo lata, v závislosti od toho, na čo je pripojený, potom je vhodný iba frekvenčný menič.
Čo je to frekvenčná konverzia
 Podľa koncepcie frekvenčnej konverzie a potom frekvenčného meniča by sme mali rozumieť celému systému, ktorý niečo robí. Konkrétne prevádza frekvenciu napájacieho vinutia asynchrónneho napäťového motora. To znamená, že vašu pozornosť sústreďujeme na skutočnosť, že tu nejde o zmenu napätia, ale o jej frekvenciu. V tomto riadiacom režime sa moment na hriadeli motora udržiava pri zmene otáčok.
Podľa koncepcie frekvenčnej konverzie a potom frekvenčného meniča by sme mali rozumieť celému systému, ktorý niečo robí. Konkrétne prevádza frekvenciu napájacieho vinutia asynchrónneho napäťového motora. To znamená, že vašu pozornosť sústreďujeme na skutočnosť, že tu nejde o zmenu napätia, ale o jej frekvenciu. V tomto riadiacom režime sa moment na hriadeli motora udržiava pri zmene otáčok.
Aby ste si však mohli vytvoriť frekvenčný menič vlastnými rukami, musíte pamätať na konštrukciu a možné charakteristiky prevádzky asynchrónnych motorov. Okrem toho, pri rozhodovaní sa konkrétne vyrobiť také zariadenie, prvým krokom je nájsť motor, ktorý je vhodný pre parametre, ktorý sa vyrovná s prácou, ktorá mu bola pridelená ako súčasť hotového komplexu.
Výber motora
Ak chcete navrhnúť domáci chastotnik, mali by ste si najprv pamätať, čo je asynchrónny motor a ako to funguje. Nesynchrónny motor alebo DPT je mechanické zariadenie pozostávajúce zo statora s vinutím poľa a rotora. Druhou zložkou môže byť:
 skratované, to znamená, že stredné vodiče sú na koncoch spojené prstencami a samotné sú silné a krátke, a preto sa dizajn nazýva „veveričkové koleso“;
skratované, to znamená, že stredné vodiče sú na koncoch spojené prstencami a samotné sú silné a krátke, a preto sa dizajn nazýva „veveričkové koleso“;- vo fáze, má rotor niekoľko vinutí, ktoré sú pripojené k zberným krúžkom použitým na odstránenie napätia v generátorovom režime.
Princíp činnosti motora je veľmi jednoduchý a spočíva vo vplyve rotačného magnetického poľa vytvoreného v statore na rotor veverovej klietky, v ktorom sa vyskytuje emf. Z tohto dôvodu prúdi v rotore prúd, ktorý vedie k vytváraniu síl interagujúcich s magnetickým poľom statora. V tomto prípade sú rýchlosť rotora a magnetické pole nerovnomerné, a preto je názov asynchrónny motor.
Je rozumné predpokladať, že ak zmeníte frekvenciu napätia dodávajúceho stator, zmení sa rýchlosť rotora. V skutočnosti preto všetky vážne spoločnosti používajú na riadenie takýchto motorov presne frekvenčné meniče. Keď navrhujete obvod frekvenčného meniča pre elektrický motor vlastnými rukami, mali by ste zvážiť typ motora a všetky jeho vlastnosti. Najmä výkon, počet pólov a maximálna rýchlosť otáčania. Pripravené programy si môžete stiahnuť z online časopisu „Radiocot“ . Je ich veľa .
Získanie magnetického poľa
 Na získanie trojfázového rotačného magnetického poľa je potrebné prejsť prúd cez cievku na statore pri požadovanej frekvencii, ktorá bude určená vzorcom: iA = I m sinωt. V dôsledku pôsobenia tohto prúdu začne MDS FA pôsobiť pozdĺž osi zákruty. Pretože zatáčky v statore sa striedajú vo fázach, zvlnenie bude mať rovnaký charakter a vytvorí spoločnú pulzujúcu silu F, ktorá je konštantná. Je definovaná ako koreň štvorcových síl v dvoch smeroch posunutých voči sebe navzájom pod uhlom 90 °.
Na získanie trojfázového rotačného magnetického poľa je potrebné prejsť prúd cez cievku na statore pri požadovanej frekvencii, ktorá bude určená vzorcom: iA = I m sinωt. V dôsledku pôsobenia tohto prúdu začne MDS FA pôsobiť pozdĺž osi zákruty. Pretože zatáčky v statore sa striedajú vo fázach, zvlnenie bude mať rovnaký charakter a vytvorí spoločnú pulzujúcu silu F, ktorá je konštantná. Je definovaná ako koreň štvorcových síl v dvoch smeroch posunutých voči sebe navzájom pod uhlom 90 °.
Výsledkom je rotácia poľa s uhlovou rýchlosťou, vyjadrenou vzorcom pre každú otáčku zvlášť: ω = 2π f 1. Na výpočet rýchlosti poľa v celom stroji je však potrebné zohľadniť celkový počet párov pólov vyjadrený symbolom p. A potom sa rýchlosť poľa bude rovnať: ω 0 = 2π f 1 / p. Podľa toho je možné vypočítať rýchlosť vyjadrenú v ot / min: n0 = 60 f 1 / p.
Okrem týchto údajov treba pamätať na to, že charakteristiky sa budú líšiť od voľnobežného režimu, to znamená pri ω = ω 0 a pri zaťažení, keď ω ≠ ω 0. A tiež by bolo užitočné pripomenúť si, že pri zaťažení je to také, ako sklz, ktorý sa objaví v dôsledku oneskorenia ω od ω 0. A je vyjadrený ako: s = (ω 0 - ω) / ω 0. To naznačuje, že pri zostavovaní ACS so zvýšením tejto hodnoty je potrebné automaticky meniť frekvenciu napätia vo vinutí. na zabezpečenie stability rýchlosti pri rôznych zaťaženiach .
Priemyselné frekvenčné meniče
Všetky priemyselné chastotníky poskytujú rôzne princípy riadenia rýchlosti a momentu na hriadeli indukčných motorov zmenou nielen frekvencie, ale aj fázového posunu, doby nábehu regulačných impulzov, dynamického brzdenia a mnohých ďalších parametrov. Toto všetko sa zároveň vykonáva automaticky bez ďalšej účasti zvonka. Preto priemyselný obvod frekvenčného meniča pre trojfázový motor pozostáva z týchto komponentov:
 Centrálny procesor, ktorý funguje ako zhluk hlavných a riadiacich impulzov.
Centrálny procesor, ktorý funguje ako zhluk hlavných a riadiacich impulzov.- Napájacia jednotka: usmerňovač a súčasne riadiaca jednotka, postavená na moduloch IGBT.
- Jednotka vstupu a výstupu údajov alebo iba rozhranie pre interakciu používateľa.
- Prevodník zbernice pre prácu s programovým riadiacim systémom.
Trojfázový motor môže byť vybavený senzorom, potom je potrebná spätná väzba. Senzor môže byť optický, indukčný alebo magnetický. Vo vysokootáčkových motoroch sa rýchlosť vypočítava programovo na základe charakteristík.
Výhody používania frekvenčných prevodníkov
Nie je to pre nič za nič, že ľudia začali aktívne používať frekvenčné meniče vo všetkých typoch podnikov a dokonca aj v každodennom živote, pretože sú omnoho ekonomickejší ako zberacie motory a môžu pracovať v podmienkach, v ktorých sa kefový motor rýchlo rozpadá. Okrem toho všetko použitie frekvenčného meniča umožnilo nahradiť mechanické variátory pohonnými systémami, čo výrazne zjednodušilo konštrukciu zariadenia. A vzhľadom na to, že DPT prakticky nevyžaduje opravu počas prevádzky, je použitie meniča jednoducho ideálnym riešením.
Malo by sa však chápať, že existujú regulačné limity, pri ktorých sa zmení aj princíp riadenia indukčného motora:
- Pri regulácii otáčok v rozsahu 16: 1 alebo menej je potrebné používať menič, ktorý pracuje na voltfrekvenčnej odozve.
- Na reguláciu v rozsahu 50: 1 sa musí použiť vektorové bezsenzorové riadenie.
- Vo veľkých rozsahoch by sa spätná väzba mala používať pomocou senzorov alebo regulátora pid integrovaného do meniča.
V každom prípade, keď sa plánuje použitie motora v náročných prevádzkových podmienkach, ku ktorým zvyčajne dochádza, je lepšie použiť vektorové riadenie.
Regulácia vektora a frekvencie
 Aby bolo možné vybudovať vysoko kvalitný samohybný strelný systém s asynchrónnym riadením motora, je potrebné dobre rozumieť pojmom, a to vektorovej regulácii alebo regulácii frekvencie.
Aby bolo možné vybudovať vysoko kvalitný samohybný strelný systém s asynchrónnym riadením motora, je potrebné dobre rozumieť pojmom, a to vektorovej regulácii alebo regulácii frekvencie.
Frekvenčný princíp sa uplatňuje v systémoch, v ktorých nie je potrebné prísne kontrolovať rýchlosť, a je dôležitý prietok vytvorený motorom bez významného zaťaženia. Ak je však potrebné zaistiť vysoký krútiaci moment a dobrú trakciu od prvého zákruty, malo by sa použiť vektorové riadenie.
Vektorové samohybné delá sa používajú aj v sledovacích systémoch s nízkym posuvom. Napríklad v strojoch na podávanie stolov alebo podperách vretien. Pritom nie je potrebné len prekonať zotrvačnosť lôžka, ale tiež vynaložiť potrebné úsilie pri obrábaní dielca.
Pri navrhovaní chastotnika pre trojfázový elektromotor vlastnými rukami je potrebné zohľadniť typ záťaže, pretože od neho bude závisieť aj charakteristika ovládania výkonových spínačov, aby sa dosiahol požadovaný výkon s minimálnymi stratami.
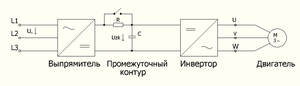
Invertorská technická implementácia
Takže sa dostávame k konštrukcii blokového diagramu indukčného motora. Okamžite by ste sa mali uistiť, že takmer všetci výrobcovia tohto typu prevodníkov používajú rovnaký obvodový obvod, aký môžete použiť na navrhnutie vlastného prevodníka. Pozostáva z nasledujúcich komponentov:
 Nekontrolované usmerňovacie trojfázové 380 V alebo jednofázové sieťové napätie 220 V.
Nekontrolované usmerňovacie trojfázové 380 V alebo jednofázové sieťové napätie 220 V.- Jednosmerná zbernica so zabudovaným LC - filtrom, pozostávajúca zo sady kondenzátorov, ktoré zaisťujú jej stabilný náboj a eliminujú zvlnenie počas prepätia v sieti.
- Napäťový invertor, ktorý prevádza konštantné stredné napätie na striedavé napätie požadovanej frekvencie. Je vybavený PWM pre kontrolu kvality.
- Asynchrónny elektrický motor, ktorý je riadený.
Malo by sa povedať, že výrobcovia už dlho kráčali smerom k vytváraniu ideálneho PWM, pomocou ktorého by bolo možné stabilne ovládať motor. A to bolo možné len s príchodom IGBT modulov. Z tohto dôvodu sa pri zostavovaní vlastného prevodníka odporúča používať kľúče s napätím najmenej 1200 V, berúc do úvahy možné zvlnenie siete a dobrú medzu prúdu. Na trhu je celkom možné nájsť tranzistory a moduly do 100 a viac A.
Zjednodušený obvod meniča blokov bude vyzerať takto:
 Usmerňovač, jeho pripojenie sa vykonáva podľa princípu jednofázového alebo dvojfázového mostíkového obvodu. Je určený na prevod striedavého napätia na jednosmerný prúd, vhodný na ďalšiu konverziu frekvencie z 0 Hz na sieťovú frekvenciu. Medziľahlý obvod podmienečne pozostáva z dvoch blokov:
Usmerňovač, jeho pripojenie sa vykonáva podľa princípu jednofázového alebo dvojfázového mostíkového obvodu. Je určený na prevod striedavého napätia na jednosmerný prúd, vhodný na ďalšiu konverziu frekvencie z 0 Hz na sieťovú frekvenciu. Medziľahlý obvod podmienečne pozostáva z dvoch blokov:- Zariadenia na plynulé nabíjanie zbernice, aby sa pri nabíjaní kondenzátorov nepoškodili vedenia na vedenie prúdu. Hovorí sa tomu odolnosť proti štrku.
- Blok kondenzátorov je filter.
Vypočítané napätie medziobvodu je ~ 2 krát väčšie ako U N. Po dosiahnutí požadovanej úrovne konštantného napätia na zbernici je odpor premostený kontaktným párom. Posledným blokom v obvode je menič. Toto je posledný hnací motor výstupných impulzov, ktoré sa potom privádzajú do motora, čím sa zabezpečuje jeho rotácia pri danej rýchlosti.
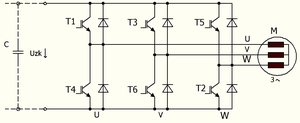
Všeobecná štruktúra výkonového modulu je znázornená na nasledujúcom obrázku:
 Na zostavenie meniča sa používajú tranzistory s vysokým prúdom, ktoré pracujú v čisto spínacom režime. Pritom sú veľmi horúce, takže sú inštalované na veľkých radiátoroch s veľkou oblasťou odvádzania tepla.
Na zostavenie meniča sa používajú tranzistory s vysokým prúdom, ktoré pracujú v čisto spínacom režime. Pritom sú veľmi horúce, takže sú inštalované na veľkých radiátoroch s veľkou oblasťou odvádzania tepla.
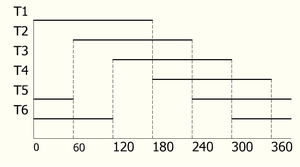
Ak chcete navrhnúť riadiaci obvod meniča, musíte si jasne predstaviť vadu klávesov. Venujte pozornosť nasledujúcemu obrázku:
Zobrazuje časové intervaly pre každý z kľúčov nainštalovaných v tomto poradí, ako je znázornené na predchádzajúcom obrázku. To znamená, že vo fáze U fungujú tranzistory T1 a T4, vo fáze V - T3 a T6 atď. Pre každé vinutie motora je hromada IGBT. Pri konštrukcii meniča pre nízkonapäťové motory s nízkymi prúdmi môžete použiť jednoduché bipolárne alebo poľné tranzistory.
Časový diagram ukazuje, že v prvom okamihu sa tranzistory T1, T5 a T6 otvoria. Ďalej tranzistory Tl a T6 zostávajú otvorené, zatiaľ čo T5 sa uzatvára a T2 sa otvára a tak ďalej. Tento diagram úplne opakuje napäťový diagram v 3-fázovej sieti, ale iba impulzy majú pravouhlý tvar a regulátor má nastavenú frekvenciu.
Výsledkom je akési cyklické prepínanie tranzistorov, zatiaľ čo prúd vo fázach sa voči sebe posúva o 120 °. A na získanie riadiaceho napätia, pozostávajúceho z mnohých impulzov, vo forme sínusového signálu s minimálnym počtom harmonických, použite pomer tranzistorov zapínania a vypínania.
Aby sa minimalizovali straty v motore, ktoré sa zvyčajne vyskytujú počas pokusov o reguláciu znížením napätia cez vinutia motora, uchýlia sa k zvýšeniu frekvencie.
Zásada regulácie rýchlosti
Na zmenu rýchlosti otáčania hriadeľa motora je potrebné zmeniť frekvenciu f 1, ale malo by sa to robiť opatrne. Napokon je potrebné udržiavať magnetický prúd nezmenený. Aby sa udržala táto rovnováha, U1 musí byť úmerná f1, ale ak je rovnováha narušená, magnetizačný prúd sa buď zníži alebo zvýši. V súlade s tým bude pole oslabené alebo presýtené. Aby sa to zabezpečilo, u / f charakteristika sa volí lineárne, až kým sa nedosiahne uhlová frekvencia. Vyskytuje sa, keď napätie na vinutí stúpa na maximum.